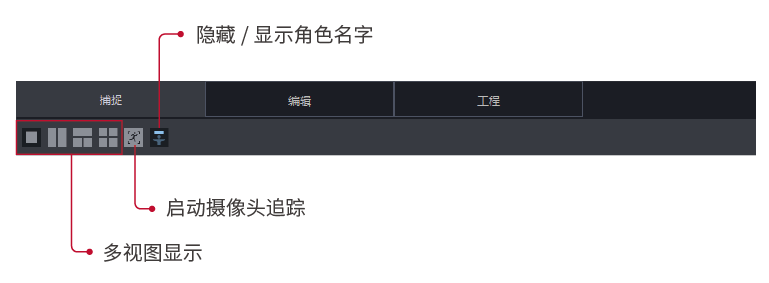
3. 捕捉界面
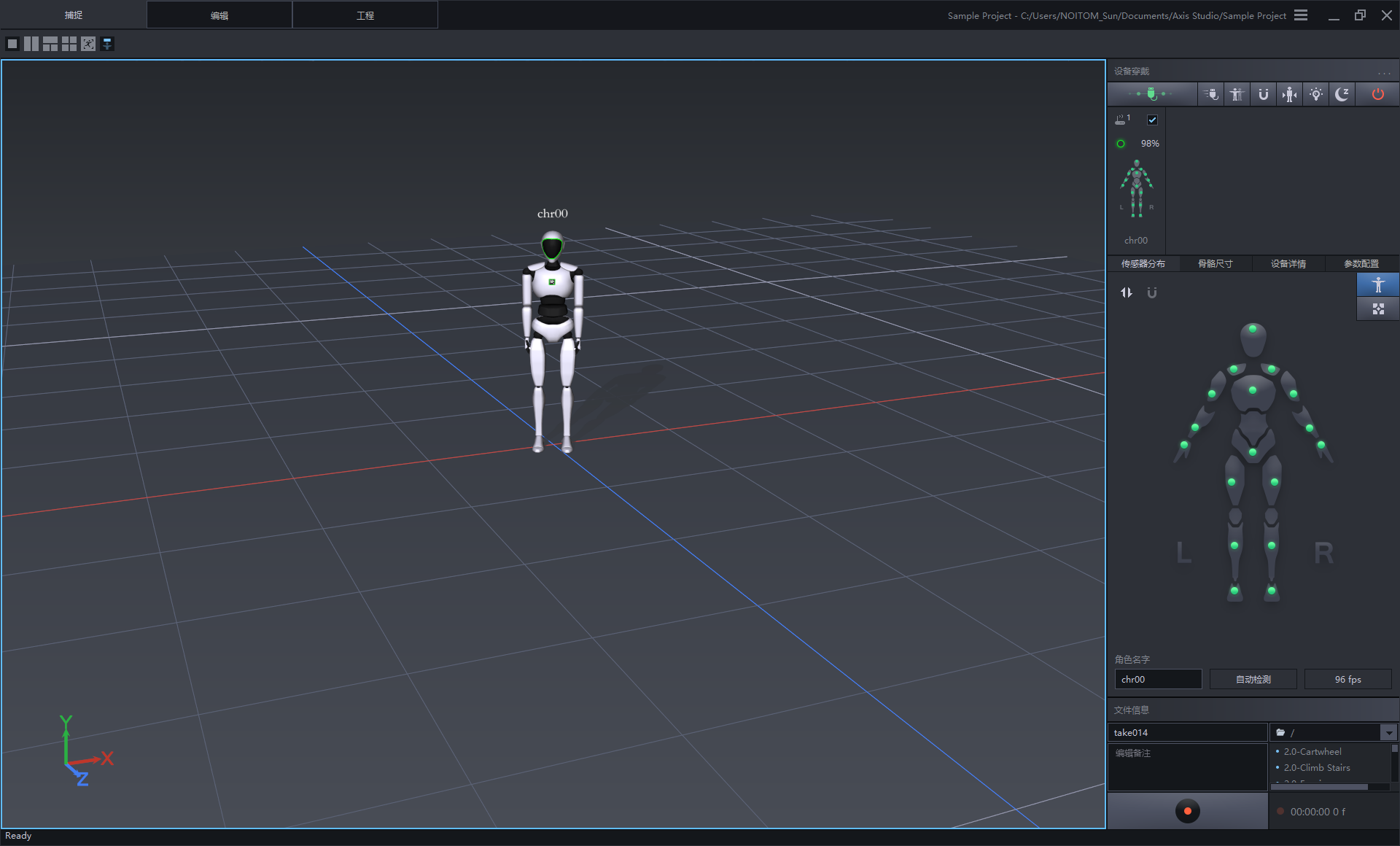
3.1 3D视图功能
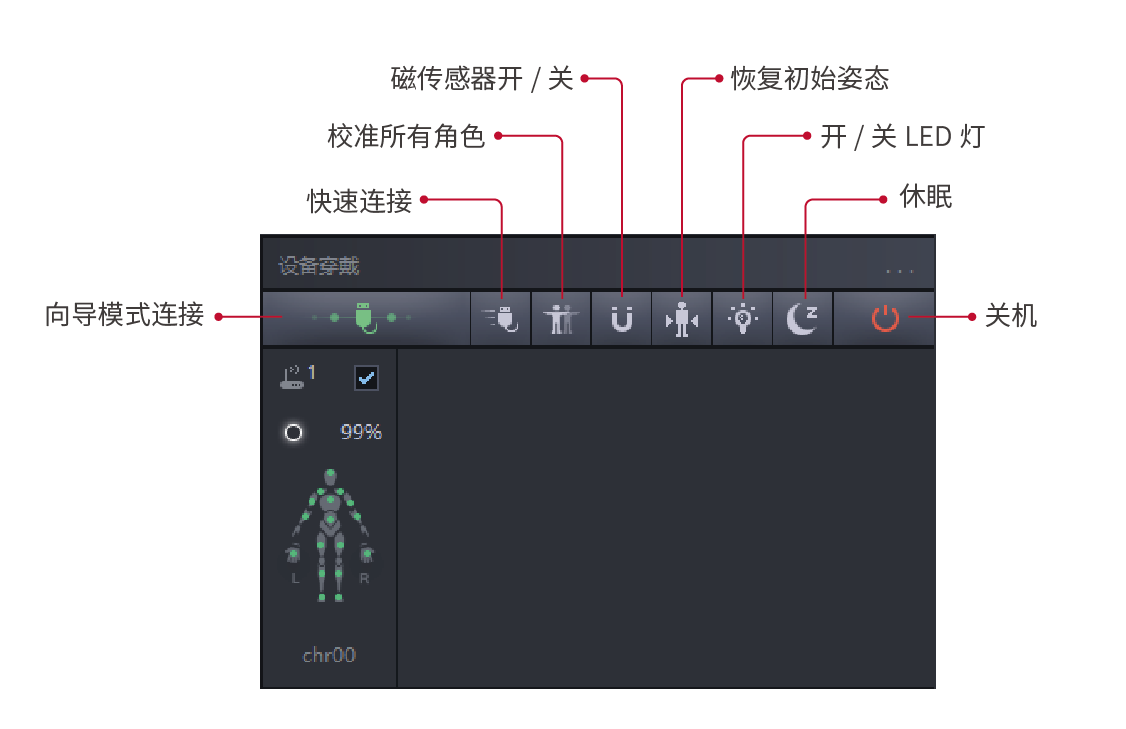
3.2 设备穿戴
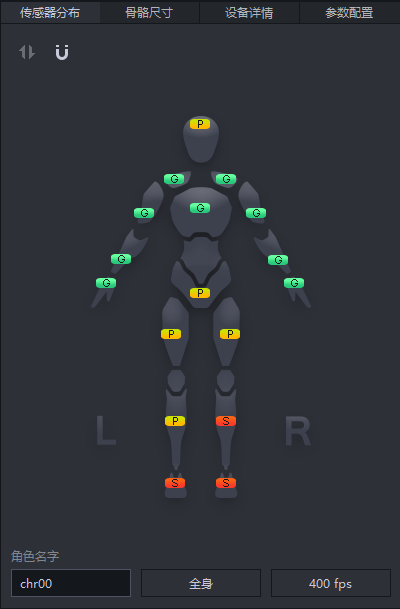
3.3 传感器分布
传感器信号强度(圆形点)
绿色为强。
黄色为中。
红色为差。
灰色代表没有传感器连接。
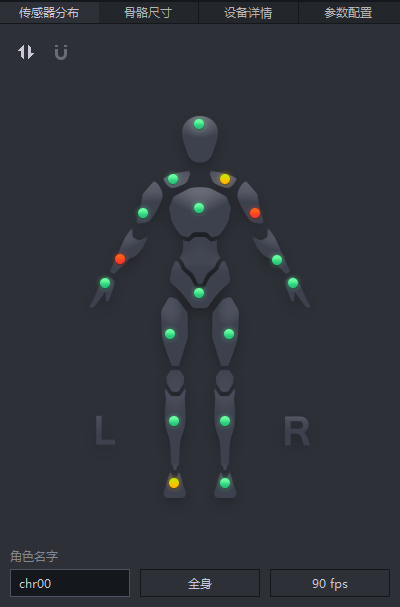
- 可在左下角角色名字选项框中自定义角色名字。
- 右下角为动捕模式和捕捉帧数。
磁环境(方形点)
- 绿色为好(G)。
- 黄色为中(P)。
- 红色为差(S)。
- 灰色代表没有传感器连接或者处于抗磁模式。
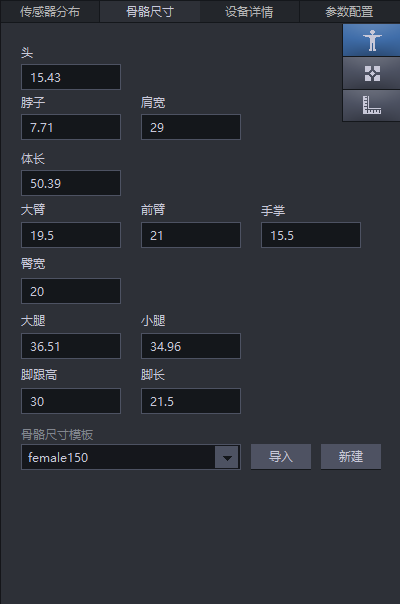
3.4 骨骼尺寸
此处可以自定义骨骼尺寸,也可加载骨骼尺寸模板。
3.5 设备详情
显示各个传感器的详细信息,包括传感器 ID、传感器信号、磁场等级和电量。

3.6 参数配置
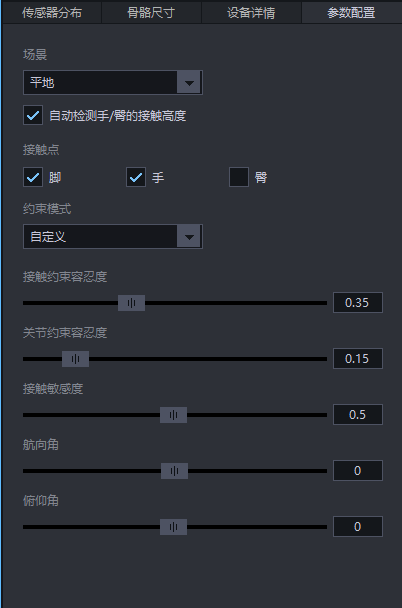
场景
- 平地:如果您的动捕场景是在平地上进行捕捉,请使用平地模式。
- 爬楼梯:如果您要上下楼或没有固定地面的情况下运动,请使用自由攀爬模式。
- 臀锁定:臀锁定意味着将你的虚拟人物模型的腰部锁定在某个位置,当您在跑步机上跑步或使用吊索时可以使用此模式。
自动检测手/臀的接触高度
- 勾选此选项框可以在平地模式下完成不同高度的手、臀接触动作。
接触点
- 当您准备进行动作捕捉时候,基于您想捕捉的动作,您可以提前选择手或者脚将会与地板或固定的表面接触。
- 在大多数情况下,我们会默认选择脚部接触。如果您想要捕捉侧手翻或者俯卧撑等动作,您需要同时勾选脚接触和手接触。
- 勾选臀接触,算法会判断您的臀部是否接触,如果判断为接触,则会固定您的臀部位置。
约束模式
- 普适模式:适用于大多数场景。
- 稳态接触:选择此模式会让接触更加稳定。
- 自定义:当以上默认参数模式不适用时,根据参数定义调整以适配当前动捕状态。
接触约束容忍度
- 调整脚与地面接触的约束容忍度。
- 数值越小,脚步与地面接触更加牢固。
- 数值越大,脚步与地面接触更容易滑动。
关节约束容忍度
- 人体真实的骨骼之间存在间隙,关节刚度是为了调整动捕算法里允许此间隙值的大小。
- 数值越大,算法允许的间隙越大,整个人体模型看起来就越松弛。
接触敏感度
- 接触敏感度决定接触算法判断是否敏感。
- 数值越大,越容易判断接触。
- 数值越小,越不容易判断接触。
航向角
- 调整虚拟人体模型的偏航方向。
- 您可以直接在第三方软件中使用它来控制虚拟人物的方向。
俯仰角
- 调整虚拟人体模型的俯仰角度。
- 如果您发现虚拟人体模型过于前倾,则需将俯仰角的值调高一点。
- 或者如果您发现虚拟人体模型过于后仰,则需降低俯仰角的值。
3.7 录制功能
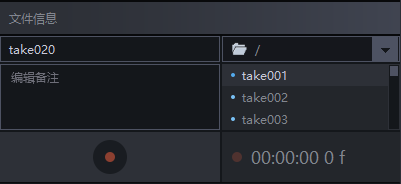
点击红色图标进行开始/结束录制数据。